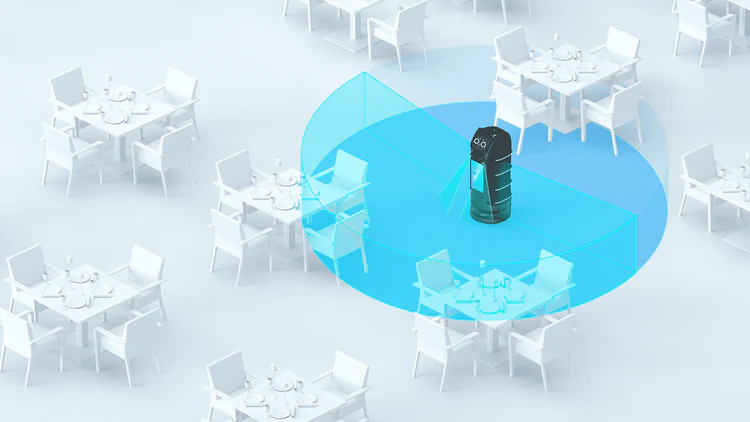
Auf Grundlage des Pudu SLAM-Positionierungssystems nutzt der CC1 sowohl visuelle (VSLAM) als auch laserbasierte (Laser SLAM) Navigations- und Positionierungstechnologien, um Aufgaben auch in komplexen Umgebungen besonders effizient auszuführen. Dank seiner multifusionierten Sensorik erkennt der Roboter Hindernisse zuverlässig, stoppt bei Bedarf sofort und weicht selbstständig aus.